




HandVivante™ MirrorHand
Empowering Mirror Therapy with Robotics
Categories Upper Extremity, VivantePlexus™
Tag handvivante-mirrorhand
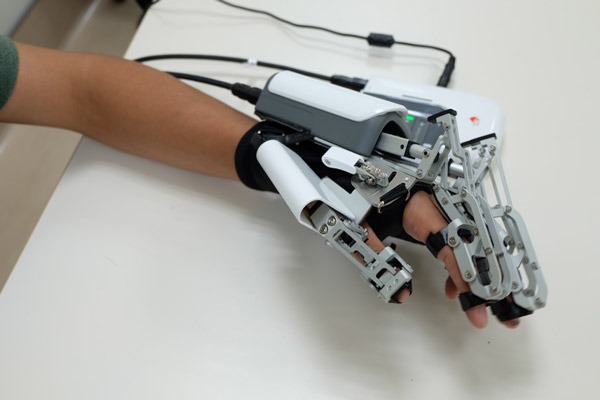
HandVivante™ is a compact, desk-based robotic exoskeleton designed to deliver structured, high-impact mirror therapy for patients recovering from stroke and other neurological impairments. It enhances the traditional mirror therapy approach by offering intelligent movement guidance, user engagement, and precise bilateral motion control. Whether used in-clinic or at home, HandVivante™ transforms passive mirror exercises into active neurorehabilitation.
Key Features
Bimanual Training
The master-slave guided control mode allows the fingers of user’s injured hand to mimic the movements of a healthy hand.

Passive Range of Motion Training
Individual finger operation mode.
Five-finger operation mode.
Clinical Rationale
Mirror therapy is a well-established neurorehabilitation technique that uses visual feedback from the unaffected limb to stimulate motor recovery in the affected one (Thieme 2018). Traditionally performed with a physical mirror, its effectiveness is limited by the user’s ability to generate voluntary movement and maintain engagement.
Robotic systems enhance mirror therapy by enabling coordinated, adaptive bilateral movement, while also supporting a wider range of interactive and task-specific exercises that are difficult to reproduce manually. Rather than enforcing identical trajectories, robotic assistance can be tuned to encourage variation and progressive challenge, which are known to stimulate motor learning and neuroplasticity. Nisar et al. (2024) showed that integrating robotics with virtual activities of daily living led to clinically significant improvements in post-stroke upper limb function (on 10 post stroke participants), including gains in Fugl-Meyer and ARAT scores. Studies also reported greater participant motivation and engagement due to the visual-motor feedback provided by the mirror therapy. Both robotic and conventional therapies yielded notable gains, but higher gains were observed in the FMA, BI scores and joint range of motion, particularly in distal joints, in robotic mirror therapy group compared to that in conventional therapy (Wu 2025).
Mirror therapy was also shown to prime the brain by engaging mirror neuro systems, increasing cortical excitability before robotic training (Chen 2023).
HandVivante™ is developed by Prof Yucheng Pei and Dr Jian-Jia Huang, who investigated the mirror hand therapy robotic protocols (Chen 2020). Further investigations, such as in Ma 2022, found higher improvement in WMFT functional ability, as well as earlier improvements in FMA (distal) in the robot assisted groups compared to the conventional therapy, in addition to the general improvement across the measures found on both groups. The team further developed their robotic hand exoskeleton platform into a commercialise grade device – the HandVivante™, which are designed to deliver the following capabilites:
- Guiding motion through powered actuation on the affected hand
- Capturing bilateral movement synchrony for visual-motor coupling
- Allowing real-time task adaptability and session monitoring
This makes it particularly effective for early-stage rehabilitation, where voluntary movement may be minimal and cognitive engagement is crucial.
References:
Thieme 2018 H Thieme, N Morkisch, J Mehrholz, M Pohl, J Behrens, B Borgetto, C Dohle (2018) Mirror therapy for improving motor function after stroke, Cochrane Database of Systematic Reviews, Review – Intervention.
Nisar 2024 H Nisar, S Annamraju, S Deka, A Horowitz, D Stipanovic, Robotic mirror therapy for stroke rehabilitation through virtual activities of daily living, Computational and Structural Biotechnology Journal, vol 24, P126-135, Dec 2024.
Chen 2023 Chen, Y.-W., Li, K.-Y., Lin, C.-H., Hung, P.-H., Lai, H.-T., & Wu, C.-Y. (2023). The effect of sequential combination of mirror therapy and robot-assisted therapy on motor recovery and self-efficacy in stroke patients. Scientific Reports, 13, 16841.
Wu 2025 Wu, X., Qiao, X., Xie, Y., Yang, Q., An, W., Xia, L., Li, J., & Lu, X. (2025). Rehabilitation training robot using mirror therapy for the upper and lower limb after stroke: a prospective cohort study. Journal of NeuroEngineering and Rehabilitation, 22, Article 45.
Chen 2020 Chen YM, Lai SS, Pei YC, Hsieh CJ, Chang WH. Development of a Novel Task-oriented Rehabilitation Program using a Bimanual Exoskeleton Robotic Hand. J Vis Exp. 2020 May 20;(159).
Ma 2022 Ma D, Li X, Xu Q, Yang F, Feng Y, Wang W, Huang JJ, Pei YC, Pan Y. Robot-Assisted Bimanual Training Improves Hand Function in Patients With Subacute Stroke: A Randomized Controlled Pilot Study. Front Neurol. 2022 Jul 6;13:884261.